About Me
Hello! I'm Hari Prasad Gajurel, a Mechanical Engineer with a strong interest in both theoretical and applied problems in control theory and AI/ML.
I am genuinely astounded by "The unreasonable effectiveness of mathematics as the language of nature" (Eugene Wigner). This drives my passion for the software implementation of theoretical ideas, 3D CAD design, and embedded systems. To me, engineering is about optimizing parameters to obtain the best result.
Research & Interests
- Control Systems: Optimizing parameters for stability and performance.
- Machine Learning: Bridging control systems and learning algorithms.
- Robotics: 3D Design, Motion Planning, and Embedded Systems.
Research Projects

Figure 1: Model-Based Control System Architecture
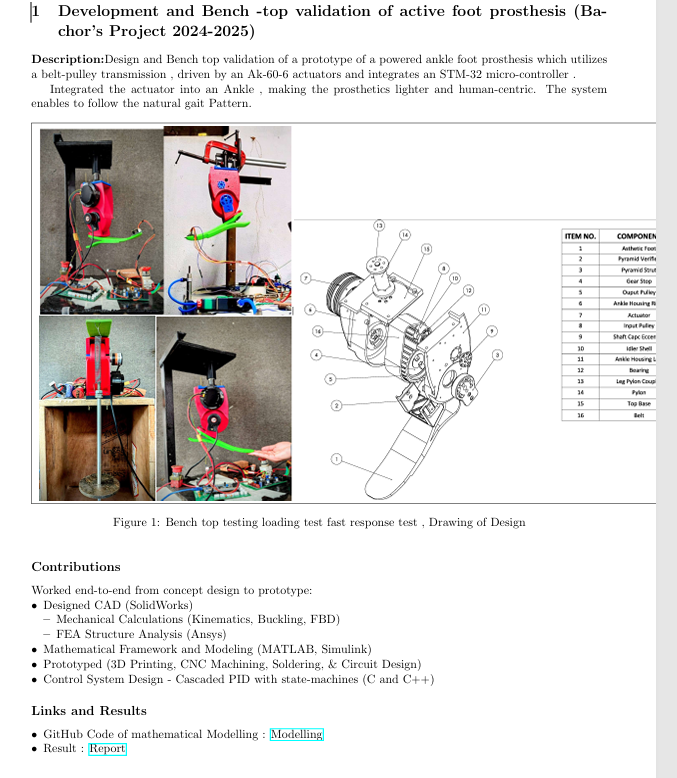
Figure 2: Prototype Bench-top Testing & Design
Design and Bench top validation of a prototype of a powered ankle foot prosthesis which utilizes a belt-pulley transmission, driven by an Ak-60-6 actuators and integrates an STM-32 micro-controller. Integrated the actuator into an Ankle, making the prosthetics lighter and human-centric. The system enables to follow the natural gait Pattern.
- Designed CAD (SolidWorks)
- Mechanical Calculations (Kinematics, Buckling, FBD)
- FEA Structure Analysis (Ansys)
- Mathematical Framework and Modeling (MATLAB, Simulink)
- Prototyped (3D Printing, CNC Machining, Soldering, & Circuit Design)
- Control System Design - Cascaded PID with state-machines (C and C++)
Links and Results:
• GitHub Code of mathematical Modelling : Modelling
• Result : Report
Education
-
B.E. in Mechanical Engineering 2021 - PresentIOE Pulchowk Campus, Nepal
Publications & Projects
-
[Title of Your Overleaf Project] 2024w/ Co-authors (if any)
[Short description of the project from the Overleaf document. Briefly explain the problem and your solution/methodology.] [PDF/Link]
-
ABU Robocon 2023 Robot 2023Robot Design & Mechanism Analysis
Designed and manufactured the robot mechanism; conducted stress analysis and optimization for performance reliability.
-
Custom Drone Development 2023Winner, Dronacharya Competition (Locus)
Mathematical modeling (MATLAB), hardware selection, and assembly of a custom drone.
-
Maze Solving Robot 2022Algorithm Implementation
Implemented Dijkstra's algorithm in C++ for shortest-path autonomous navigation.
Certificates
- CSWA Associate – Dassault Systèmes
- Control System (PDSC)
- Pytorch – DataCamp
Outreaching & Volunteering
-
[Volunteering Role / Event] [Date][Organization/Club]
(Content to be added. This section can showcase leadership roles, mentorship, or community service.)